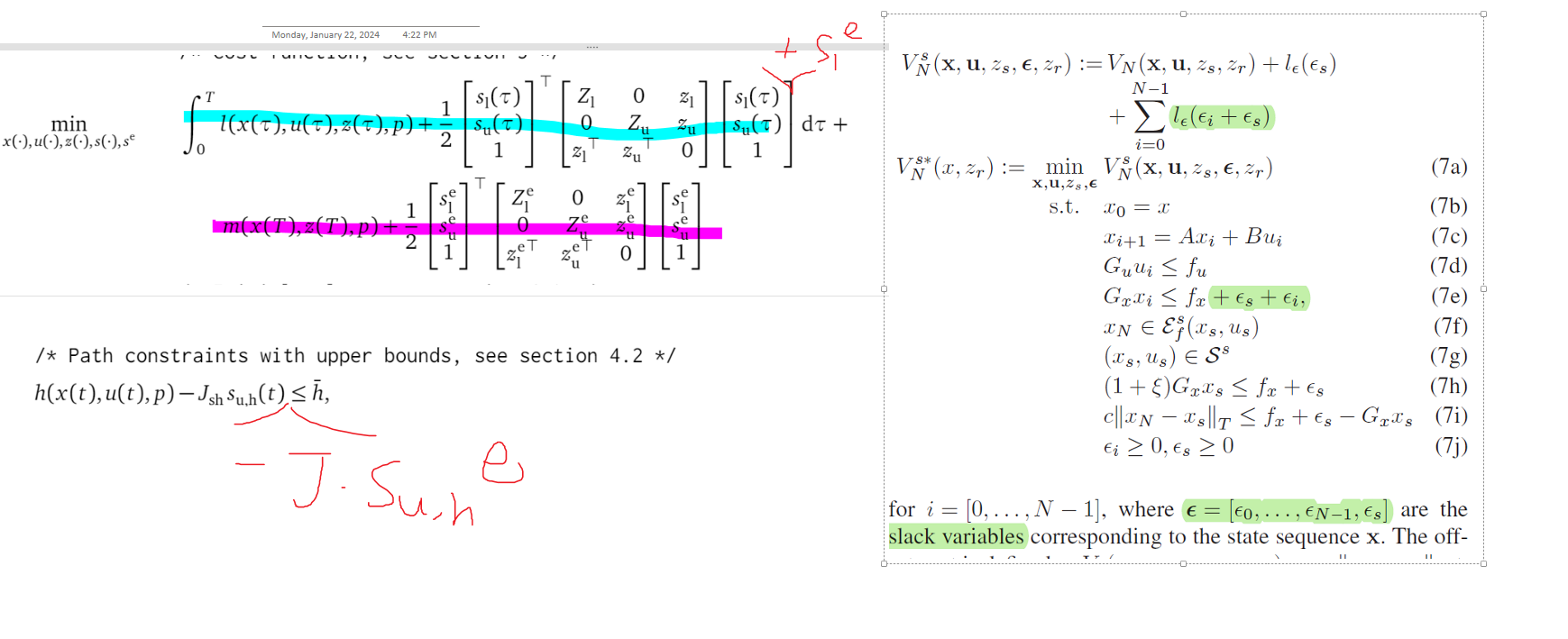
As the photo above right side, we have in stage cost for slack variable and in stage constraints such terms, in which both stage slack epsilon_i and terminal slack epsilon_s exist.
However, in acados problem formulation, as the left side, we can’t add a term related to terminal slack variable to stage cost or any stage constraint.
Is there a way to implement this kind of formulation with acados? Or it is not supported now?
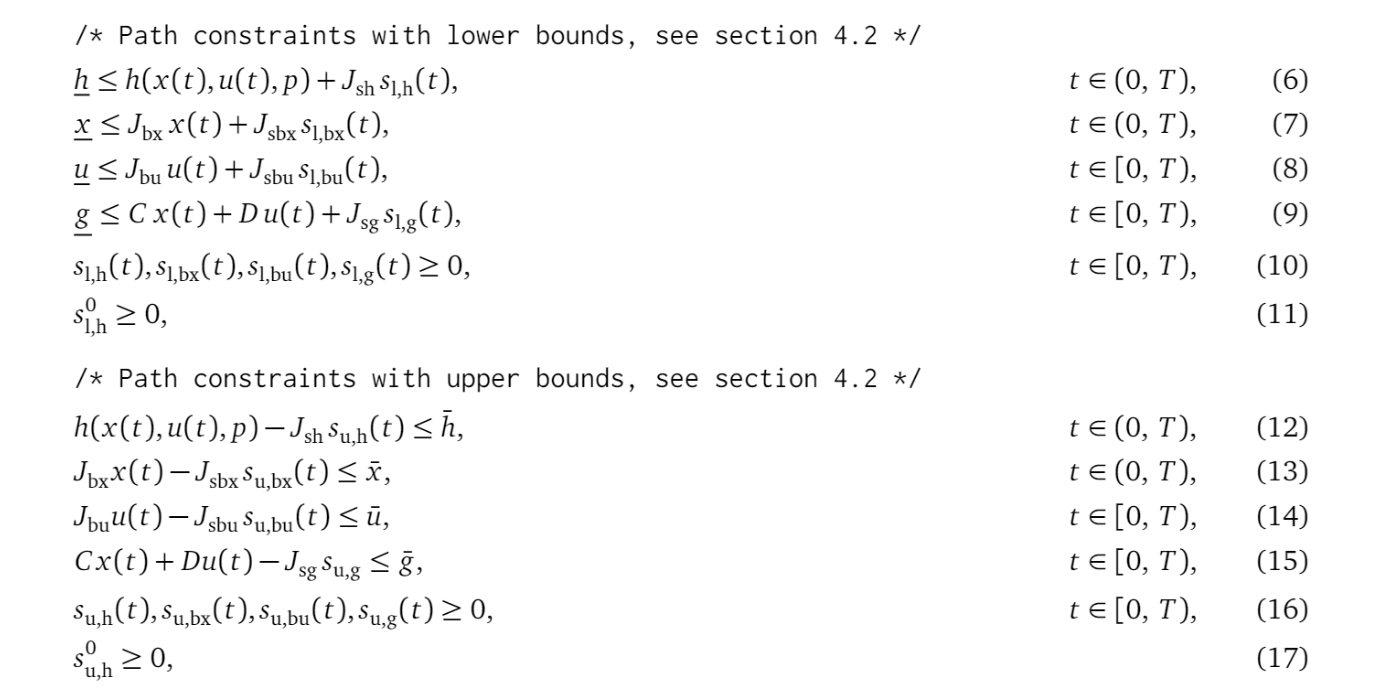
Hello,thanks for you replay. However I am still not clear after reading the PDF.
For example: here we can map terminal slacks on to the constraint for x(T) , which is terminal constraint for state variable. But what I need to implement is to map terminal slacks on to the constraint for x(t) , which is path constraint.
@yiweiwang
Hi, yiwen Wang,
Have you already applied slack variables in ACADOS? I am currently facing the same problem as you, how to add slack variables and their cost function. If possible, could you also provide me with some guidance? Thank you advanced.