Hello,
I am working on a nonlinear model predictive control (NMPC) problem for a racing car using the Matlab interface of Acados. The goal is to control the racing car to follow a given trajectory while minimizing control effort. The trajectory optimization also using Acados solver and successfull. I’m using the below model:
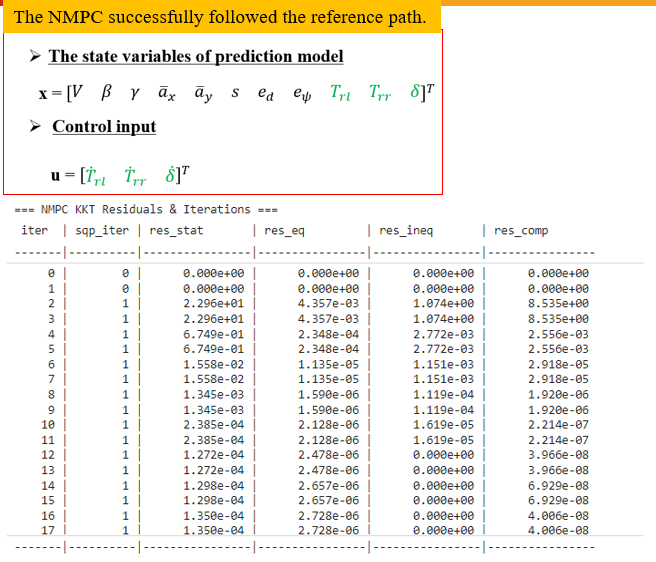
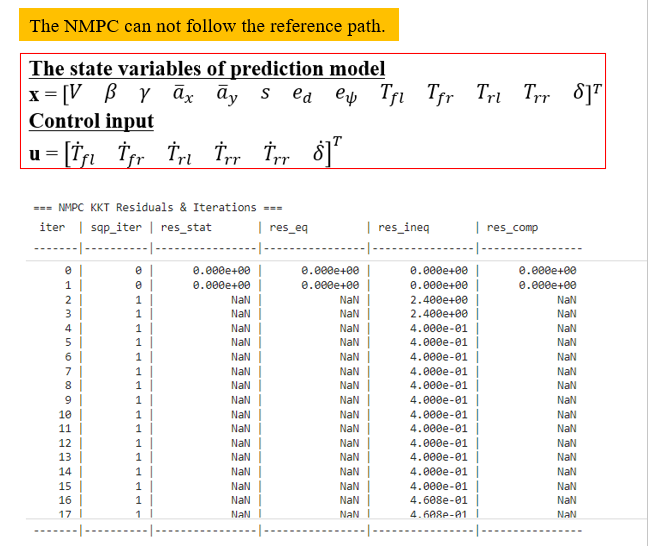
The state variables of prediction model

I am encountering three main issues during the simulation:
-
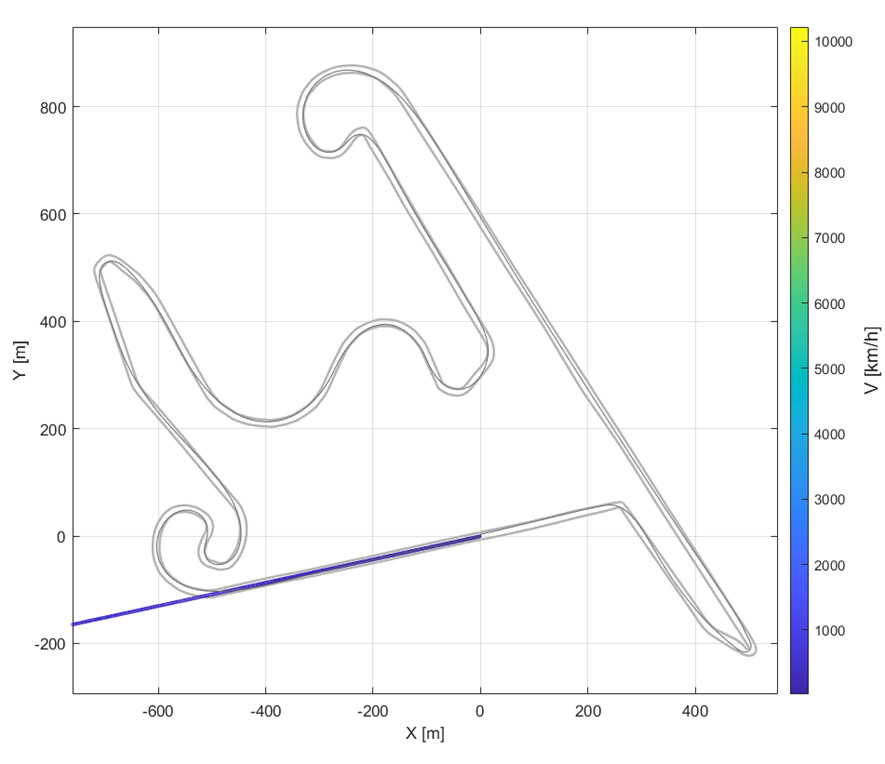
Trajectory tracking: The vehicle does not follow the reference trajectory properly – it cuts corners significantly, especially in tight turns (see attached figure: gray = reference, blue = actual, color = speed).
-
Cost function: Please reference to the below code
%% COST FUNCTION
eV_max = 1;
ebeta_max = 0.05;
n_max = 0.1;
chi_max = 0.05;
beta_ref = atan(delta*veh.lr/veh.l);
symx = vertcat((beta-beta_ref)/ebeta_max, (V-V_ref)/eV_max, n/n_max, chi/chi_max);
symu = vertcat(dot_Tfl/dot_Tfl_s, dot_Tfr/dot_Tfr_s,dot_Trl/dot_Trl_s, dot_Trr/dot_Trr_s, dot_delta/dot_delta_s);
Q = diag([1, 1, 100, 100]);
R = diag([1, 1, 1, 1, 1]);
delta_ff = atan(veh.l * kappa);
% (1) Track curvature feedforward
J_delta_ff = 2 * (delta - delta_ff)^2;
% (2) Frenet feedback (force convergence to centerline)
J_delta_fb = 5 * (delta - delta_ff - 0.8*n - 0.5*xi)^2;
% -------- Torque vectoring penalties (LIGHT) --------
LR = (Tfl - Tfr)^2 + (Trl - Trr)^2;
FB = ((Tfl + Tfr) - (Trl + Trr))^2;
Mz_drive = veh.wt/(2*veh.rw) * ( (Tfr - Tfl) + (Trr - Trl) );
Yaw_term = Mz_drive^2;
% -------- Stage cost --------
model.expr_ext_cost = ...
0.5 * (symx.' * Q * symx) ...
+ 0.5 * (symu.' * R * symu) ...
+ J_delta_ff ...
+ J_delta_fb ...
+ 0.0005 * LR ...
+ 0.001 * FB ...
+ 0.001 * Yaw_term;
model.expr_ext_cost_e = 0.5*symx'*Q*symx;
3. NMPC generate: Please reference to the below code
```matlab
% 4WD NMPC – ACADOS Codegen
% Matching new ocp_model_racecar_4wd (13 states, 5 inputs)
clear all; clc;
if ~isdeployed
cd(fileparts(which('nmpc_gen')));
end
if isfile('c_generated_code\CMakeCache.txt')
delete('c_generated_code\CMakeCache.txt');
end
acados_env_variables_windows
%% Vehicle parameters, initial conditions
veh = veh_params();
opt_e = 1e-3;
V0 = 5; % initial speed
%% Load model (13-state 4WD)
model = ocp_model_racecar();
nx = model.nx;
nu = model.nu;
np = model.np;
x_s = model.x_s;
u_s = model.u_s;
N = model.N;
T = model.T;
Ts = model.Ts;
%% Create OCP model
ocp_model = acados_ocp_model();
ocp_model.set('name', model.name);
ocp_model.set('T', model.T);
ocp_model.set('sym_x', model.x);
ocp_model.set('sym_xdot', model.xdot);
ocp_model.set('sym_u', model.u);
ocp_model.set('sym_p', model.p);
%% Dynamics: IRK
sim_method = 'irk';
%Dynamics
if (strcmp(sim_method,'erk'))
ocp_model.set('dyn_type', 'explicit');
ocp_model.set('dyn_expr_f', model.expr_f_expl);
elseif (strcmp(sim_method, 'irk'))
ocp_model.set('dyn_type', 'implicit');
ocp_model.set('dyn_expr_f', model.expr_f_impl);
end
%% Cost function
ocp_model.set('cost_type', 'ext_cost');
ocp_model.set('cost_type_e', 'ext_cost');
ocp_model.set('cost_expr_ext_cost', model.expr_ext_cost);
ocp_model.set('cost_expr_ext_cost_e', model.expr_ext_cost_e);
ny_x = 4;
ny_e = ny_x;
ny_u = 5;
ny = ny_x + ny_u;
nbx = nx;
Jbx = eye(nx);
ocp_model.set('constr_Jbx', Jbx);
ocp_model.set('constr_lbx', model.x_min);
ocp_model.set('constr_ubx', model.x_max);
%% Input bounds (5)
nbu = 5;
Jbu = eye(nbu,nu);
ocp_model.set('constr_Jbu', Jbu);
ocp_model.set('constr_lbu', model.u_min);
ocp_model.set('constr_ubu', model.u_max);
% Nonlinear constraints: 5 inequalities (μ ellipse + orthogonality)
nh = 5;
ocp_model.set('constr_expr_h', model.constraint.expr);
ocp_model.set('constr_lh', [0, 0, 0, 0, 0]);
ocp_model.set('constr_uh', [0, 1, 1, 1, 1]);
Jsh = eye(nh);
ocp_model.set('constr_Jsh', Jsh);
ocp_model.set('cost_zl', zeros(nh,1));
ocp_model.set('cost_zu', zeros(nh,1));
ocp_model.set('cost_Zl', diag([10 10 10 10 1]));
ocp_model.set('cost_Zu', diag([10 10 10 10 1]));
% Initial state for solver (13 states)
x0 = zeros(nx,1);
x0(9) = 5; % Tfl
x0(10) = 5; % Tfr
x0(11) = 5; % Trl
x0(12) = 5; % Trr
%x0(13) = 0; % delta
x0 = x0 ./ model.x_s; % normalize
ocp_model.set('constr_x0', x0);
%% Solver parameters
compile_interface = 'auto';
codgen_model = 'true';
nlp_solver = 'sqp_rti'; % sqp, sqp_rti
% nlp_solver = 'sqp_rti'; % sqp, sqp_rti
qp_solver = 'full_condensing_hpipm'; % full_condensing_hpipm, partial_condensing_hpipm, full_condensing_qpoases
nlp_solver_exact_hessian = 'true'; % false=gauss_newton, true=exact
%% acados ocp set opts
ocp_opts = acados_ocp_opts();
ocp_opts.set('compile_interface', compile_interface);
ocp_opts.set('codgen_model', codgen_model);
ocp_opts.set('param_scheme_N', model.N);
ocp_opts.set('nlp_solver', nlp_solver);
ocp_opts.set('nlp_solver_exact_hessian', nlp_solver_exact_hessian);
ocp_opts.set('sim_method', sim_method);
ocp_opts.set('sim_method_num_stages', 2);
ocp_opts.set('sim_method_num_steps', 1)
ocp_opts.set('qp_solver', qp_solver);
% nlp solver
eps_nlp = 1e-4;
ocp_opts.set('nlp_solver_max_iter', 30);
ocp_opts.set('nlp_solver_tol_stat', eps_nlp);
ocp_opts.set('nlp_solver_tol_eq', eps_nlp);
ocp_opts.set('nlp_solver_tol_ineq', eps_nlp);
ocp_opts.set('nlp_solver_tol_comp', eps_nlp);
% ... see ocp_opts.opts_struct to see what other fields can be set
p0 = [5, V0];
ocp_opts.set('parameter_values', p0);
%% get available simulink_opts with default options
simulink_opts = get_acados_simulink_opts;
% manipulate simulink_opts
% inputs
simulink_opts.inputs.lbx = 1;
simulink_opts.inputs.ubx = 1;
simulink_opts.inputs.lh = 0;
simulink_opts.inputs.uh = 0;
simulink_opts.inputs.lbu = 0;
simulink_opts.inputs.ubu = 0;
% outputs
simulink_opts.outputs.utraj = 1;
simulink_opts.outputs.xtraj = 1;
simulink_opts.outputs.cost_value = 1;
simulink_opts.outputs.KKT_residual = 0;
simulink_opts.outputs.KKT_residuals = 1;
%% Generate acados OCP
ocp = acados_ocp(ocp_model, ocp_opts, simulink_opts);
%% set initial trajectory
x_init = zeros(N+1,nx);
x_init(:,1) = V0*ones(N+1,1);
x_init(:,9) = opt_e*ones(N+1,1);
x_init(:,10) = opt_e*ones(N+1,1);
x_init(:,11) = opt_e*ones(N+1,1);
x_init(:,12) = opt_e*ones(N+1,1);
x_init = x_init./model.x_s';
u_init = zeros(N,nu);
ocp.set('init_x', x_init');
ocp.set('init_u', u_init');
ocp.set('init_pi', zeros(nx, N));
%% Compile Sfunctions
cd c_generated_code
make_sfun; % ocp solver
% make_sfun_sim; % integrator
copyfile('acados_solver_sfunction_nmpc.mexw64','..\sim')
cd ..\sim
What I have checked/tried:
- Reference trajectory is correctly interpolated and updated at every MPC step.
- Cost function weights have been tuned (tracking weights increased significantly).
- Control inputs and states are updated correctly in the loop.
- No obvious mismatches in dimensions or scaling.
Question: - Any common pitfalls in Acados setup that lead to corner-cutting?
- Are there any configuration issues in my OCP setup that could cause these problems?
- What steps should I take to improve the trajectory tracking and ensure the cost function reflects the error properly?