Hi everyone! ![]()
I am using acados with python to solve an NMPC for a simple position tracking quadrotor. My states are x = [p, q, v, \omega] and my control inputs are u = [T_{total}, M_x, M_y, M_z]. My only constraint is a box constraint on the total thrust where T_{min} < T < T_{max}. My weights only penalize the position error for now since I want to make sure everything is working properly first before fine tuning anything.
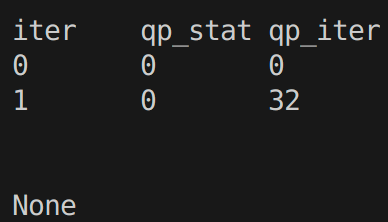
The issue is my solver seems to ONLY solve for the total thrust, and the other inputs are always zero and I can’t seem to figure out why. This causes my position tracking to not work in the x and y directions but work perfectly in the z direction. Below is a minimal example to replicate my issue.
import casadi as ca
import scipy.linalg
import matplotlib.pyplot as plt
from acados_template import AcadosModel, AcadosOcp, AcadosOcpSolver, AcadosSimSolver
def quat_multiply(q1, q2):
w1 = q1[0]
x1 = q1[1]
y1 = q1[2]
z1 = q1[3]
w2 = q2[0]
x2 = q2[1]
y2 = q2[2]
z2 = q2[3]
w = w1*w2 - x1*x2 - y1*y2 - z1*z2
x = w1*x2 + x1*w2 + y1*z2 - z1*y2
y = w1*y2 - x1*z2 + y1*w2 + z1*x2
z = w1*z2 + x1*y2 - y1*x2 + z1*w2
return ca.vertcat(w, x, y, z)
###################################### Quadrotor parameters ##############################################
m = 2.02 # [kg]
Ix = 0.011 # [kg.m^2]
Iy = 0.015 # [kg.m^2]
Iz = 0.021 # [kg.m^2]
g = 9.81 # [m/s^2]
l = 0.26 # [m]
ct = 5.84e-6 # []
cq = 0.06*ct # []
T_min = 0 # [N]
T_hover = m*g # [N]
T_max = 28.3 # [N]
######################################### OCP settings ###################################################
# Discretization
dt = 0.05 # [s]
N_horizon = 20 # prediction horizon length
# NLP solver
nlp_solver = "SQP_RTI"
# QP solver
qp_solver = "PARTIAL_CONDENSING_HPIPM"
hessian_approx = "GAUSS_NEWTON"
# Integrator
integrator_type = "ERK"
sim_method_num_stages = 4
sim_method_num_steps = 1
# Cost function
cost_type = "LINEAR_LS" # Stage cost
cost_type_e = "LINEAR_LS" # Terminal cost
Q = np.diag([10, 10, 10, # Position
0, 0, 0, 0, # Quaternions
0, 0, 0, # Velocity
0, 0, 0,]) # Angular Velocity
QN = np.diag([10, 10, 10, # Position
0, 0, 0, 0, # Quaternions
0, 0, 0, # Velocity
0, 0, 0,]) # Angular Velocity
R = np.diag([0, 0, 0, 0])
################################## Symbolic state variables #####################
# Position
px = ca.SX.sym('px')
py = ca.SX.sym('py')
pz = ca.SX.sym('pz')
# Quaternions
q0 = ca.SX.sym('q0')
q1 = ca.SX.sym('q1')
q2 = ca.SX.sym('q2')
q3 = ca.SX.sym('q3')
# Velocity
vx = ca.SX.sym('vx')
vy = ca.SX.sym('vy')
vz = ca.SX.sym('vz')
# Angular velocity
wx = ca.SX.sym('wx')
wy = ca.SX.sym('wy')
wz = ca.SX.sym('wz')
### ############################ Symbolic control variables #####################
T = ca.SX.sym('T')
Mx = ca.SX.sym('Mx')
My = ca.SX.sym('My')
Mz = ca.SX.sym('Mz')
#################################### NMPC class ############################
class NMPC():
def __init__(self):
self.ocp = None
self.solver = None
self.simulator = None
self.x0 = None
self.u0 = None
self.xN = None
self.uN = None
def model_setup(self):
# Position dynamics
pxDot = vx
pyDot = vy
pzDot = vz
# Quaternion dynamics
wq = ca.vertcat(0, wx, wy, wz)
q = ca.vertcat(q0, q1, q2, q3)
qDot = 0.5 * quat_multiply(q, wq)
q0Dot = qDot[0]
q1Dot = qDot[1]
q2Dot = qDot[2]
q3Dot = qDot[3]
# Velocity dynamics
Rq = ca.vertcat(ca.horzcat( 1 - 2*(q2**2 + q3**2), 2*(q1*q2 - q0*q3), 2*(q1*q3 + q0*q2)),
ca.horzcat( 2*(q1*q2 + q0*q3), 1 - 2*(q1**2 + q3**2), 2*(q2*q3 - q0*q1)),
ca.horzcat( 2*(q1*q3 - q0*q2), 2*(q2*q3 + q0*q1), 1 - 2*(q1**2 + q2**2)))
F = ca.vertcat(0, 0, T)
G = ca.vertcat(0, 0, g)
vDot = 1/m * Rq @ F - G
vxDot = vDot[0]
vyDot = vDot[1]
vzDot = vDot[2]
# Angular velocity dynamics
J = ca.diag([Ix, Iy, Iz])
M = ca.vertcat(Mx, My, Mz)
w = ca.vertcat(wx, wy, wz)
wDot = ca.inv(J) @ (M - ca.cross(w, J @ w))
wxDot = wDot[0]
wyDot = wDot[1]
wzDot = wDot[2]
# States
state = ca.vertcat(px, py, pz,
q0, q1, q2, q3,
vx, vy, vz,
wx, wy, wz)
# Controls
control = ca.vertcat(T, Mx, My, Mz)
# Dynamics
stateDot = ca.vertcat(pxDot, pyDot, pzDot,
q0Dot, q1Dot, q2Dot, q3Dot,
vxDot, vyDot, vzDot,
wxDot, wyDot, wzDot)
return state, control, stateDot
def ocp_setup(self, x0):
### Setting up model ###
state, control, stateDot = self.model_setup()
model = AcadosModel()
model.name = "nmpc"
model.x = state
model.u = control
model.f_expl_expr = stateDot
### Setting up acados solver ###
ocp = AcadosOcp()
ocp.model = model
# Dimensions
nx = state.size()[0]
nu = control.size()[0]
ny = nx + nu
ny_e = nx
# Control constraints
ocp.constraints.idxbu = np.array([0])
ocp.constraints.lbu = np.array([T_min])
ocp.constraints.ubu = np.array([T_max])
# Contuinity constraint
self.x0 = x0
ocp.constraints.x0 = self.x0
# Cost function
ocp.cost.cost_type = cost_type
ocp.cost.cost_type_e = cost_type
ocp.cost.W = scipy.linalg.block_diag(Q, R)
ocp.cost.W_e = QN
ocp.cost.Vx = np.vstack([
np.eye(nx),
np.zeros((nu, nx))
])
ocp.cost.Vx_e = np.eye(nx)
ocp.cost.Vu = np.vstack([
np.zeros((nx, nu)),
np.eye(nu)
])
ocp.cost.yref = np.zeros((ny, 1))
ocp.cost.yref_e = np.zeros((ny_e, 1))
### Acados solver settings ###
ocp.solver_options.N_horizon = N_horizon
ocp.solver_options.tf = N_horizon * dt
ocp.solver_options.nlp_solver_type = nlp_solver
ocp.solver_options.qp_solver = qp_solver
ocp.solver_options.hessian_approx = hessian_approx
ocp.solver_options.integrator_type = integrator_type
ocp.solver_options.sim_method_num_stages = sim_method_num_stages
ocp.solver_options.sim_method_num_steps = sim_method_num_steps
### Creating solver ###
self.ocp = ocp
self.solver = AcadosOcpSolver(ocp, json_file = "nmpc.json")
self.integrator = AcadosSimSolver(ocp)
def solve_ocp(self):
# Solve ocp with multiple shooting and simulate with RK4
self.u0 = self.solver.solve_for_x0(self.x0)
# Retrieve solutions for all time steps
nx = self.ocp.dims.nx
nu = self.ocp.dims.nu
self.xN = np.zeros((nx, N_horizon+1))
self.uN = np.zeros((nu, N_horizon))
for i in range(N_horizon):
self.xN[:, i] = np.reshape(self.solver.get(i, 'x'), (nx,))
self.uN[:, i] = np.reshape(self.solver.get(i, 'u'), (nu,))
self.xN[:, N_horizon] = np.reshape(self.solver.get(N_horizon, 'x'), (nx,))
return self.x0, self.u0, self.xN, self.uN
if __name__ == "__main__":
controller = NMPC()
x0 = np.array([0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0])
controller.ocp_setup(x0)
yref_array = np.zeros((17, N_horizon+1))
yref = np.array([1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0])
for i in range(N_horizon):
controller.solver.cost_set(i, "yref", yref)
yref_array[:, i] = controller.solver.cost_get(i, "yref")
controller.solver.cost_set(N_horizon, "yref", yref[:13])
yref_array[:13, -1] = controller.solver.cost_get(N_horizon, "yref")
# NMPC solver (current pos = [0, 0, 0], target_pos = [1, 1, 1])
x0, u0, xN, uN = controller.solve_ocp()
# Position plot
t = np.linspace(0, N_horizon * dt, N_horizon + 1)
fig, ax = plt.subplots(3, 1)
ax[0].plot(t, xN[0, :], label='NMPC solution')
ax[0].plot(t, yref_array[0, :], label='reference trajectory')
ax[0].set_ylabel('x')
ax[0].set_xlabel('t')
ax[0].legend()
ax[1].plot(t, xN[1, :], label='NMPC solution')
ax[1].plot(t, yref_array[1, :], label='reference trajectory')
ax[1].set_ylabel('y')
ax[1].set_xlabel('t')
ax[1].legend()
ax[2].plot(t, xN[2, :], label='NMPC solution')
ax[2].plot(t, yref_array[2, :], label='reference trajectory')
ax[2].set_ylabel('z')
ax[2].set_xlabel('t')
ax[2].legend()
# Control plot
fig, ax = plt.subplots(4, 1)
ax[0].plot(t[:-1], uN[0, :], drawstyle='steps-post')
ax[0].set_ylabel('T')
ax[0].set_xlabel('t')
ax[1].plot(t[:-1], uN[1, :], drawstyle='steps-post')
ax[1].set_ylabel('Mx')
ax[1].set_xlabel('t')
ax[2].plot(t[:-1], uN[2, :], drawstyle='steps-post')
ax[2].set_ylabel('My')
ax[2].set_xlabel('t')
ax[3].plot(t[:-1], uN[3, :], drawstyle='steps-post')
ax[3].set_ylabel('Mz')
ax[3].set_xlabel('t')
plt.show()
This is what my graphs are from running the code:
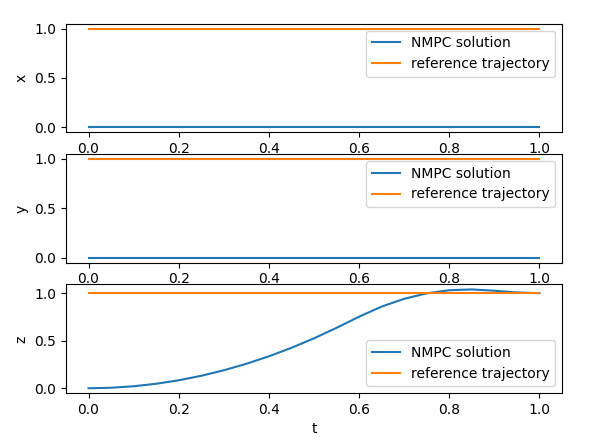
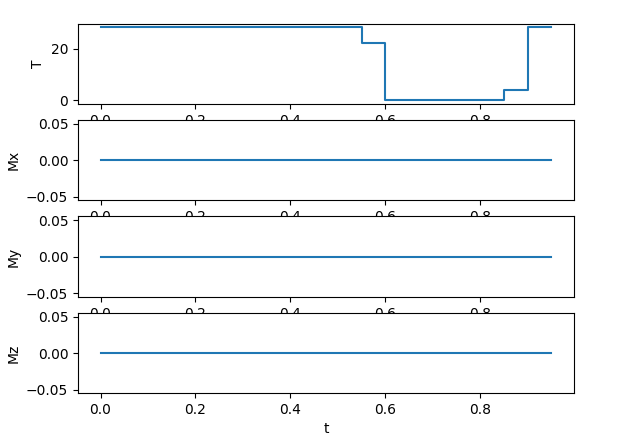
Any help would be greatly appreciated! ![]()