Hi ![]()
I’m currently looking to implement a hard nonlinear constraint that limits the position of an entity in 2d space, see figure below.
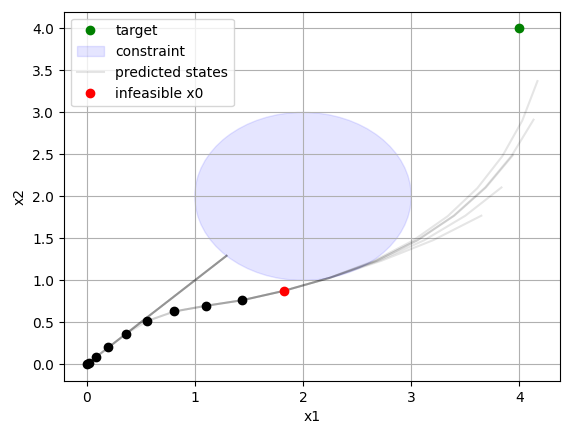
The objective is to move from [x1,x2]=[0,0] to [4,4]. The progression is shown using black dots, from which the predictions (in grey) are drawn. The predictions nicely avoid the circle. However, when the current position is close to the circular constraint (depicted by a red dot), the problem becomes unfeasible (HPIPM: QP error status 3).
I wonder why this happens. Does it have to to with the non-convexity of the feasible set, or with the way the circle is linearized?
Also, I’m able to avoid infeasibility by making the constraint soft using slack variables. I do however have to select a very specific value for these slacks as it is really sensitive: value too high=Infeasible solution at iteration 0, see figure below.
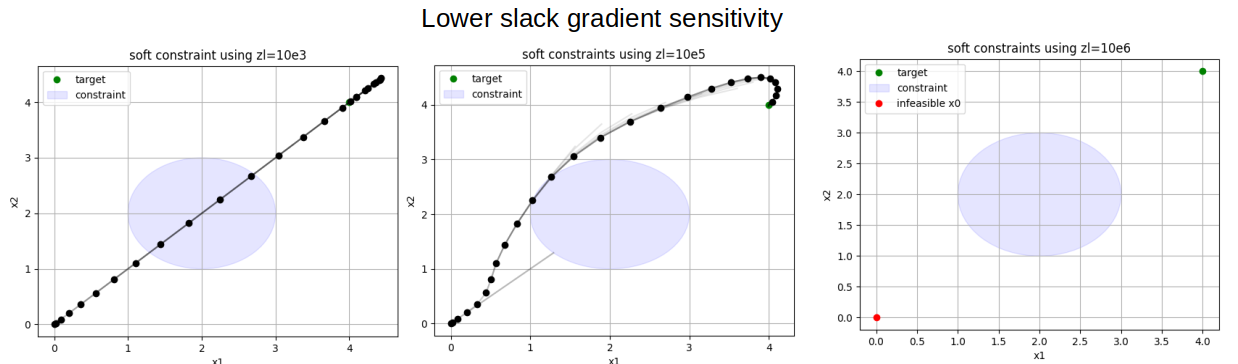
This makes me question my understanding of soft constraints, which is that violation of a soft constraint would/should be penalized by a sufficiently large (but without upper limit) weight. Could you maybe elaborate on this?
Any kind of help is sincerely appreciated!
Using the Acados python interface, I created a minimal example to reproduce the problems mentioned:
from acados_template import AcadosOcp, AcadosOcpSolver, AcadosSimSolver, AcadosModel
import numpy as np
import scipy.linalg
from casadi import SX, vertcat
import matplotlib.pyplot as plt
def export_ode_model():
model_name = 'minimalsystem'
# set up states & controls
x1 = SX.sym('x1')
x2 = SX.sym('x2')
F1 = SX.sym('F1')
F2 = SX.sym('F2')
u = vertcat(F1,F2)
# xdot
x1_dot = SX.sym('x1_dot')
x2_dot = SX.sym('x2_dot')
x = vertcat(x1, x1_dot, x2, x2_dot)
xdot = SX.sym('xdot',x.size()[0],1)
# dynamics
f_expl = vertcat(x1_dot,
F1,
x2_dot,
F2
)
f_impl = xdot - f_expl
model = AcadosModel()
model.f_impl_expr = f_impl
model.f_expl_expr = f_expl
model.x = x
model.xdot = xdot
model.u = u
model.name = model_name
return model
def main():
# create ocp object to formulate the OCP
ocp = AcadosOcp()
# set model
model = export_ode_model()
ocp.model = model
Tf = 1.5
nx = model.x.size()[0]
nu = model.u.size()[0]
ny = nx + nu
ny_e = nx
N_horizon = 10
Fmax = 2
setpoint = np.array([4,4])
x0 = np.array([0, 0.0, 0.0, 0.0])
# set dimensions
ocp.dims.N = N_horizon
# set cost module
ocp.cost.cost_type = 'LINEAR_LS'
ocp.cost.cost_type_e = 'LINEAR_LS'
Q_mat = np.diag([1e3, 1e0, 1e3, 1e0])
R_mat = np.diag([1e-2, 1e-2])
ocp.cost.W = scipy.linalg.block_diag(Q_mat, R_mat)
ocp.cost.W_e = Q_mat
ocp.cost.Vx = np.zeros((ny, nx))
ocp.cost.Vx[:nx,:nx] = np.eye(nx)
Vu = np.zeros((ny, nu))
ocp.cost.Vu = Vu
ocp.cost.Vx_e = np.eye(nx)
ocp.cost.yref = np.array([setpoint[0],0,setpoint[1],0,0,0]) #np.zeros((ny, ))
ocp.cost.yref_e = np.array([setpoint[0],0,setpoint[1],0]) #np.zeros((ny_e, ))
# linear state constraints
ocp.constraints.constr_type = 'BGH'
# ocp.constraints.constr_type = 'BGP'
ocp.constraints.lbu = np.array([-Fmax,-Fmax])
ocp.constraints.ubu = np.array([+Fmax,+Fmax])
ocp.constraints.x0 = x0
ocp.constraints.idxbu = np.array([0, 1])
# non-linear (BGH) state constraint: circle
ocp.model.con_h_expr = (model.x[0]-2)**2 + (model.x[2]-2)**2 # x1, x2
ocp.constraints.lh = np.array([1**2]) # radius
ocp.constraints.uh = np.array([10e3])
# slack variable configuration:
# nsh = 1
# ocp.constraints.lsh = np.zeros(nsh) # Lower bounds on slacks corresponding to soft lower bounds for nonlinear constraints
# ocp.constraints.ush = np.zeros(nsh) # Lower bounds on slacks corresponding to soft upper bounds for nonlinear constraints
# ocp.constraints.idxsh = np.array(range(nsh)) # Jsh
# ns = 1
# ocp.cost.zl = 10e5 * np.ones((ns,)) # gradient wrt lower slack at intermediate shooting nodes (1 to N-1)
# ocp.cost.Zl = 1 * np.ones((ns,)) # diagonal of Hessian wrt lower slack at intermediate shooting nodes (1 to N-1)
# ocp.cost.zu = 0 * np.ones((ns,))
# ocp.cost.Zu = 1 * np.ones((ns,))
# default solver params
ocp.solver_options.qp_solver = 'PARTIAL_CONDENSING_HPIPM' # FULL_CONDENSING_QPOASES, FULL_CONDENSING_HPIPM
ocp.solver_options.hessian_approx = 'GAUSS_NEWTON'
ocp.solver_options.integrator_type = 'ERK'
ocp.solver_options.nlp_solver_type = 'SQP'
ocp.solver_options.qp_solver_cond_N = N_horizon
# set prediction horizon
ocp.solver_options.tf = Tf
solver_json = 'acados_ocp_' + model.name + '.json'
acados_ocp_solver = AcadosOcpSolver(ocp, json_file = solver_json)
# create an integrator with the same settings as used in the OCP solver.
acados_integrator = AcadosSimSolver(ocp, json_file = solver_json)
Nsim = 200
simX = np.ndarray((Nsim+1, nx))
simU = np.ndarray((Nsim, nu))
simX[0,:] = x0
xy_predictions = np.zeros((N_horizon,2))
# initialize figure
fig0 = plt.figure()
ax1 = fig0.add_subplot(1,1,1)
circle = plt.Circle((2, 2), radius=1, color='blue',alpha=0.1,label='constraint')
ax1.plot(setpoint[0],setpoint[1], 'go',label='target')
ax1.add_patch(circle); ax1.set_xlabel('x1'); ax1.set_ylabel('x2'); ax1.grid()
ax1.legend()
# closed loop
runOnce = True
for i in range(Nsim):
# solve ocp and get next control input
try:
simU[i,:] = acados_ocp_solver.solve_for_x0(x0_bar = simX[i, :])
except:
ax1.plot(simX[i,0],simX[i,2],'ro',label='infeasible x0')
ax1.legend()
break
# extract solution state info
for j in range(N_horizon):
xy_predictions[j,0] = acados_ocp_solver.get(j, "x")[0] #x1
xy_predictions[j,1] = acados_ocp_solver.get(j, "x")[2] #x2
# update figure with predictions
ax1.plot(simX[i,0],simX[i,2],'ko')
ax1.plot(xy_predictions[:,0],xy_predictions[:,1],'k-',alpha=0.1)
plt.show() # put a breakpoint here to F5 and plot through the for-loop.
# simulate system
simX[i+1, :] = acados_integrator.simulate(x=simX[i, :], u=simU[i,:])
# plot results
plt.show(block=True)
if __name__ == '__main__':
main()