Hi,
I’ve generated C code from Python interface.
I want to change the qp solver .
I change the qp_solver =‘PARTIAL_CONDENSING_OSQP’ in python file, it can run successfully, and generate c code.
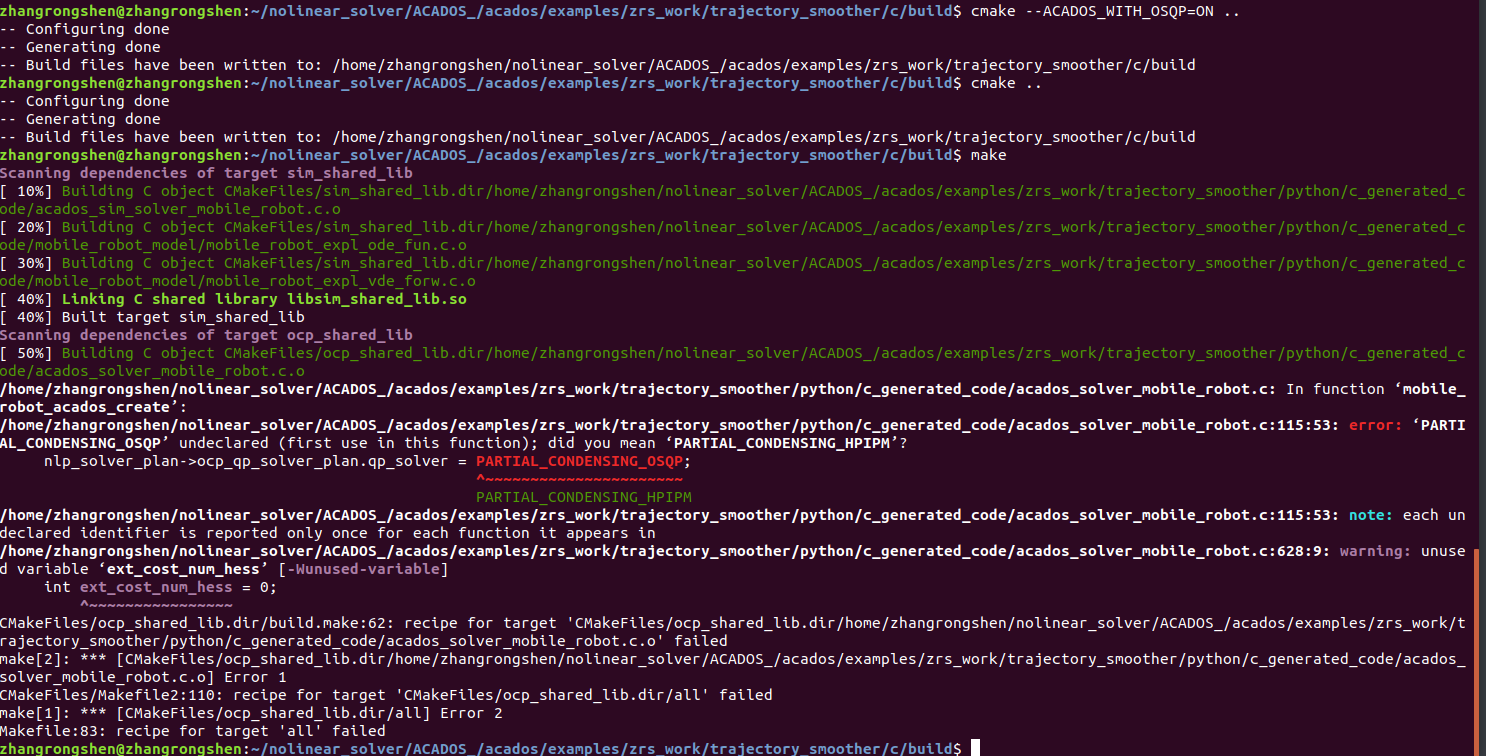
But when I use C++ to call c_generate_code to solve ocp, i get an error:
error: " c_generated_code/acados_solver_mobile_robot.c:115:53: error: ‘PARTIAL_CONDENSING_OSQP’ undeclared (first use in this function); did you mean ‘PARTIAL_CONDENSING_HPIPM’?"
When i running Python code, the terminal Displaying these information:
( cd mobile_robot_model ; gcc -fPIC -std=c99 -DACADOS_WITH_OSQP -c mobile_robot_expl_ode_fun.c mobile_robot_expl_vde_forw.c)
gcc -fPIC -std=c99 -DACADOS_WITH_OSQP -c acados_sim_solver_mobile_robot.c -I /home/zhangrongshen/nolinear_solver/ACADOS_/acados/include/blasfeo/include/ -I /home/zhangrongshen/nolinear_solver/ACADOS_/acados/include/hpipm/include/ \
-I /home/zhangrongshen/nolinear_solver/ACADOS_/acados/include -I /home/zhangrongshen/nolinear_solver/ACADOS_/acados/include/acados/ \
gcc -fPIC -std=c99 -DACADOS_WITH_OSQP -shared -o libacados_sim_solver_mobile_robot.so acados_sim_solver_mobile_robot.o mobile_robot_model/mobile_robot_expl_ode_fun.o mobile_robot_model/mobile_robot_expl_vde_forw.o -L -l \
-L /home/zhangrongshen/nolinear_solver/ACADOS_/acados/lib -lacados -lhpipm -lblasfeo \
I guess there may be an error here, but I don’t know how to modify it. . . . .
(I installed it according to the steps on the official website, and I also installed the OSQP library.)
Thanks in advance