Has there been a change to how this works? I had code working with constr_lbx_0 and constr_ubx_0, but after recent updates, it is no longer giving the correct answers. I see a new parameter constr_idxbxe_0 in the interface code that is set when using constr_x0, but not for the bounds version. What is that?
I also get different answers when using constr_x0, and when setting constr_lbx_0 and constr_ubx_0 to the same value. It almost seems like the bound on the first state is being set correctly, but the remainder are not. For example, this image shows the expected behavior from an MPC problem using constr_x0.
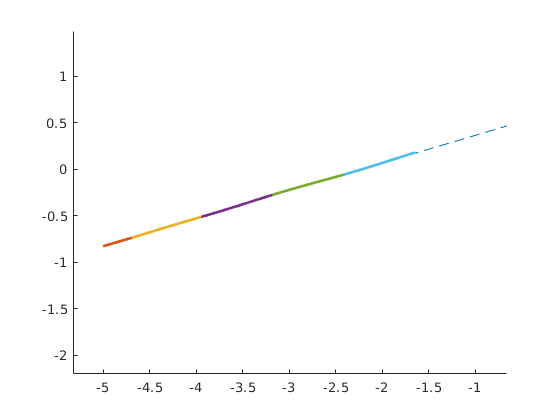
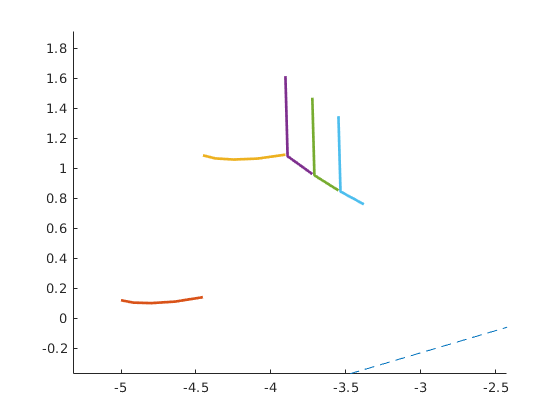
And this image shows the result I’m getting using the same x0 values in constr_lbx_0 and constr_ubx_0 with i.e. ocp.set(‘constr_lbx’,x0,0). It’s like the starting y values are offset by 1.