Hello,
I am wondering whether including algebraic variables in formulation of discrete dynamics is supported? It seems that the answer is no according to the following document, because I want algebraic variables on the LHS.
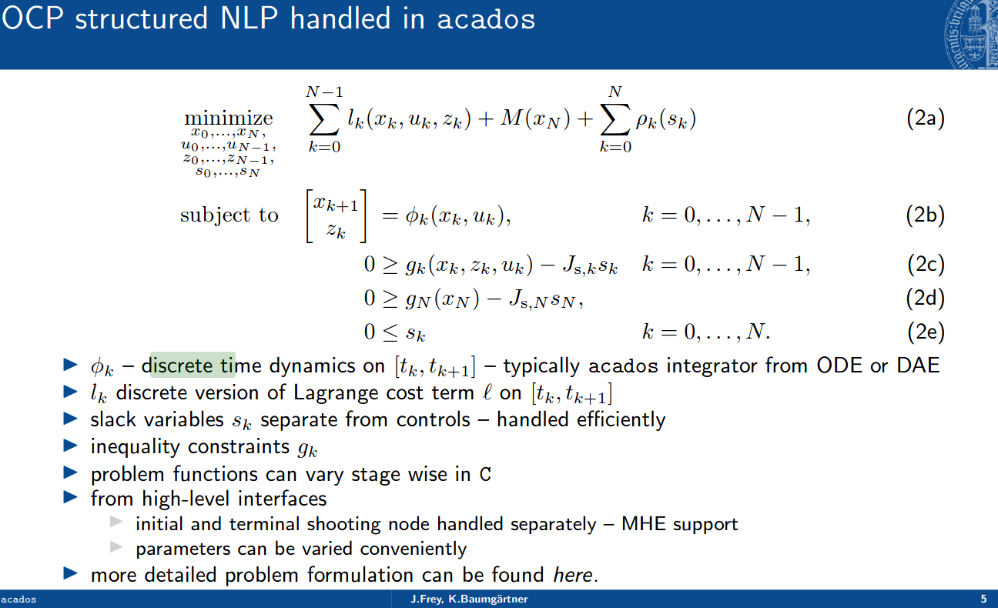
taken from https://www.syscop.de/files/2021ss/acados_workshop/2021_FOR_workshop.pdf
Or is there any work around? I want to include some term (algebraic variables) which are functions of control inputs and states in one horizon, and the term will also be used in the time integration of the prediction of next horizon. This process repeats until the final horizon.
Thanks a lot in advance!![]()