Hello all,
First, thank you to all the people involved with this tool and the forum which has already been a great resource to resolve many of my issues.
Unfortunately I have not yet been able to find the answer for this particular issue. To clarify the question from the title:
Does acados support dynamic expressions where a state is multiplied by the input (decision variable), and if so, how? I think that this question sums up the issues I am having, and I’m starting off with this general question in case there is a quick and simple answer, but I’ll elaborate on the details with a reduced example below (apologies, it is a little lengthy still):
-
I am using the
Matlabinterface ofacados, but installed just before the recent overhaul which brought the syntax in line with the Python version. -
The exact problem I encounter is that I would like to control an algebraic state,
z1, to a reference value. This state is defined asz1 = u * x1, which is the multiplication of the system input,u, and a system state,x1. Unfortunately, I can’t get that to work. (I am using the implicit dynamics mode, more details in point 4 below) -
Where I believe my problem comes from: The projected trajectory of the algebraic state,
z1, acquired from the solved ocp does not match the defined system behavior. The trajectory after solving the ocp, which is acquired viaocp.get('z'), does not match the trajectory that I can calculate by multiplying the inputs and states,u * x1, acquired fromocp.get('u')andocp.get('x'). This plot shows the difference between the two.
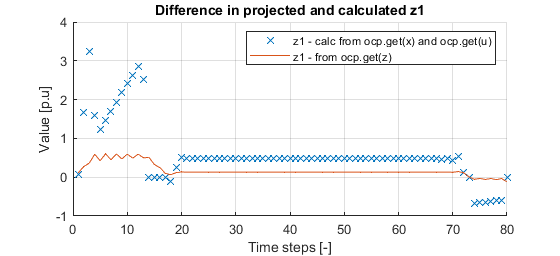
Given that this projected trajectory ofz1is incorrect, it is no surprise to me that tracking this to a reference value will not work well either. This is what leads me to ask whether such dynamics are even supported, or whether I am still setting something up incorrectly. Some additional points:
- The trajectories from
ocp.get('x')are correct, as I have verified them by applying the input trajectory to an external model. - When the system is in a more constant state the error is significantly reduced
- Reducing the sampling time also reduces the error
From here on I will describe how I set up the solver:
- How I set up the ocp: I am using the implicit dynamics mode to specify the system dynamics as follows (in this case I’m using as a reduced example an averaged model of a DC/DC buck converter, where
z1denotes the input current):
f_impl = vertcat(- x1_dot + u * (p1/p2) - x2 * (1/p2), ...
x1 * (1/p3) - x2 * (1/(p4*p3)) - x2_dot,...
z1 - (u * x1));
Where the states/inputs/params are defined as:
% // States
% // Differential States (x vector)
x1 = SX.sym('x1'); % // inductor current
x2 = SX.sym('x2'); % // capacitor voltage output
x = vertcat(x1, x2); % // state vector
% //algebraic states (z vector)
z1 = SX.sym('z1');
z = vertcat(z1);
% ///inputs
u = SX.sym('u'); % duty cycle input
% //state derivatives (x dot vector)
x1_dot = SX.sym('x1_dot'); % derivative of inductor current
x2_dot = SX.sym('x2_dot'); % derivative of capacitor voltage
x_dot = vertcat(x1_dot, x2_dot); % state derivative vector
% //system parameters (constants so no need for expressions)
% //p1, p2, p3, p4
- I initially set up the ocp with the linear least squares cost type to track
z1to a reference value. When this wasn’t working I set it up to trackx2to a reference value instead for troubleshooting. This is the case in the plot shown above in point 3.
- I have also tried to exclude
z1altogether and track theu * x1using the non-linear least squares cost module. While this does tend to reach the reference value in a step response eventually, I believe it suffers from a similar issue of incorrect projections, but I have not been able to verify this as I don’t believe there is access to the actual cost of an optimized decision, is there?
- Model and ocp settings were largely taken from the example
\acados\examples\acados_matlab_octave\pendulum_dae. At first I simply replaced the dynamic equation and states but in troubleshooting I have since then attempted most different integrator and solver settings with no luck.
Thank you to anyone who takes the time to read this, I hope you can shed some light on the situation!
(PS. I thought I had seen whole matlab script files in other posts but I haven’t been able to find those again and I haven’t yet figured out how to do it myself. If anyone would like the full script of the example I use here please let me know how to upload that ![]() )
)