Hi ![]()
I’m using Matlab as an acados interface. I’m currently working on the implementation of a NMPC for Energy Efficient Torque Vectoring on a vehicle by doing an implementation on a MABX II through dSPACE.
I’ve followed the procedure stated on acados website without any major inconvenient but while doing the final step (Build), I’m getting this error but I’m not sure what really means nor how to solve it.
MATLAB/Simulink Error:
MATLAB/Simulink Error (text):
COMPILING "Six_DOF.c"
Caution: current program unit "Six_DOF_output" is too large (34752) for higher level optimizations.
Optimizations downgraded.
Caution: current program unit "Six_DOF_initialize" is too large (44848) for higher level optimizations.
Optimizations downgraded.
COMPILING "Six_DOF_data.c"
COMPILING "Six_DOF_rticanmm.c"
COMPILING "Six_DOF_trc_ptr.c"
COMPILING "rtGetInf.c"
COMPILING "rtGetNaN.c"
COMPILING "rt_nonfinite.c"
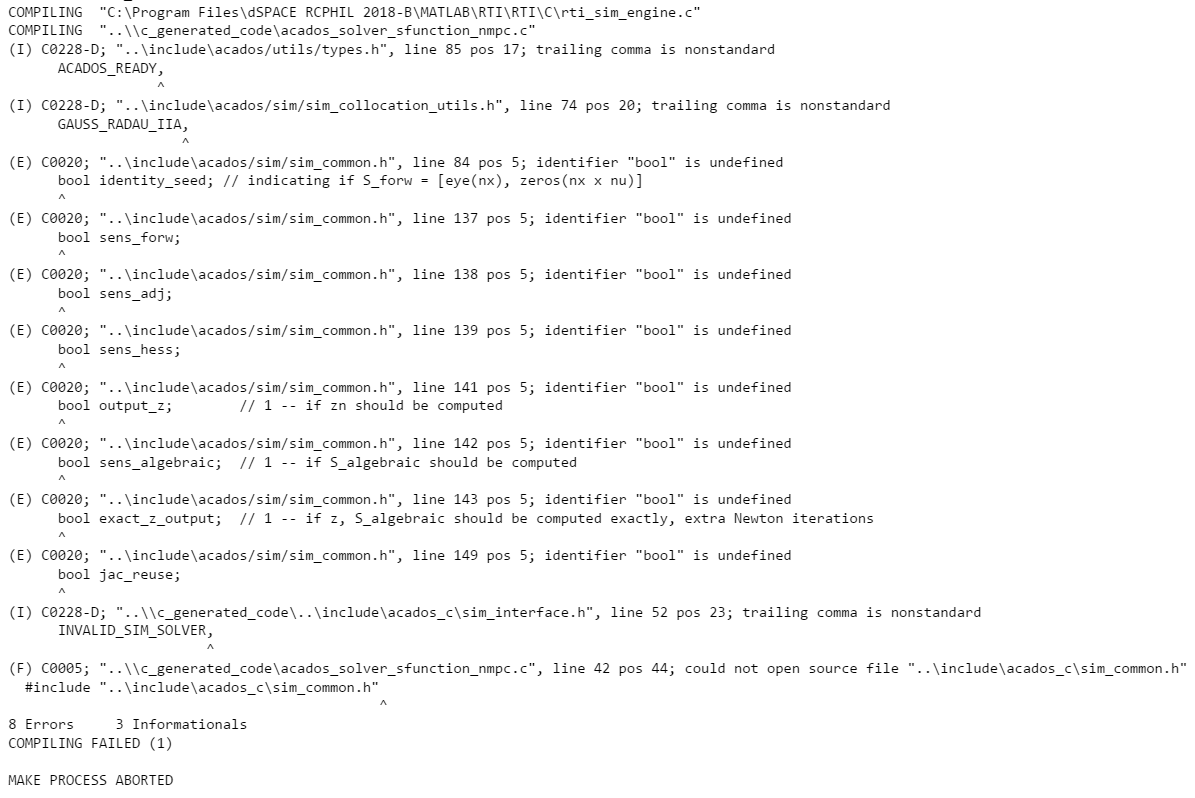
COMPILING "C:\Program Files\dSPACE RCPHIL 2018-B\MATLAB\RTI\RTI\C\rti_sim_engine.c"
COMPILING "..\\c_generated_code\acados_solver_sfunction_nmpc.c"
(I) C0228-D; "..\include\acados/utils/types.h", line 85 pos 17; trailing comma is nonstandard
ACADOS_READY,
^
(I) C0228-D; "..\include\acados/sim/sim_collocation_utils.h", line 74 pos 20; trailing comma is nonstandard
GAUSS_RADAU_IIA,
^
(E) C0020; "..\include\acados/sim/sim_common.h", line 84 pos 5; identifier "bool" is undefined
bool identity_seed; // indicating if S_forw = [eye(nx), zeros(nx x nu)]
^
(E) C0020; "..\include\acados/sim/sim_common.h", line 137 pos 5; identifier "bool" is undefined
bool sens_forw;
^
(E) C0020; "..\include\acados/sim/sim_common.h", line 138 pos 5; identifier "bool" is undefined
bool sens_adj;
^
(E) C0020; "..\include\acados/sim/sim_common.h", line 139 pos 5; identifier "bool" is undefined
bool sens_hess;
^
(E) C0020; "..\include\acados/sim/sim_common.h", line 141 pos 5; identifier "bool" is undefined
bool output_z; // 1 -- if zn should be computed
^
(E) C0020; "..\include\acados/sim/sim_common.h", line 142 pos 5; identifier "bool" is undefined
bool sens_algebraic; // 1 -- if S_algebraic should be computed
^
(E) C0020; "..\include\acados/sim/sim_common.h", line 143 pos 5; identifier "bool" is undefined
bool exact_z_output; // 1 -- if z, S_algebraic should be computed exactly, extra Newton iterations
^
(E) C0020; "..\include\acados/sim/sim_common.h", line 149 pos 5; identifier "bool" is undefined
bool jac_reuse;
^
(I) C0228-D; "..\\c_generated_code\..\include\acados_c\sim_interface.h", line 52 pos 23; trailing comma is nonstandard
INVALID_SIM_SOLVER,
^
(F) C0005; "..\\c_generated_code\acados_solver_sfunction_nmpc.c", line 42 pos 44; could not open source file "..\include\acados_c\sim_common.h"
#include "..\include\acados_c\sim_common.h"
^
8 Errors 3 Informationals
COMPILING FAILED (1)
MAKE PROCESS ABORTED
If it is somehow helpful, please find attached the s_function code as well as the make file code:
s_function
#define S_FUNCTION_NAME acados_solver_sfunction_nmpc
#define S_FUNCTION_LEVEL 2
#define MDL_START
// acados
// #include "acados/utils/print.h"
#include "..\include\acados_c\sim_interface.h"
#include "..\include\acados_c\sim_common.h"
#include "..\include\acados_c\external_function_interface.h"
// example specific
#include "nmpc_model/nmpc_model.h"
#include "acados_solver_nmpc.h"
#include "simstruc.h"
#define SAMPLINGTIME -1
static void mdlInitializeSizes (SimStruct *S)
{
// specify the number of continuous and discrete states
ssSetNumContStates(S, 0);
ssSetNumDiscStates(S, 0);
int N = NMPC_N;// specify the number of input ports
if ( !ssSetNumInputPorts(S, 2) )
return;
// specify the number of output ports
if ( !ssSetNumOutputPorts(S, 6) )
return;
// specify dimension information for the input ports
// lbx_0
ssSetInputPortVectorDimension(S, 0, 8);
// ubx_0
ssSetInputPortVectorDimension(S, 1, 8);/* specify dimension information for the OUTPUT ports */
ssSetOutputPortVectorDimension(S, 0, 2 );
ssSetOutputPortVectorDimension(S, 1, 20 );
ssSetOutputPortVectorDimension(S, 2, 88 );
ssSetOutputPortVectorDimension(S, 3, 1 );
ssSetOutputPortVectorDimension(S, 4, 1);
ssSetOutputPortVectorDimension(S, 5, 1 );
// specify the direct feedthrough status
// should be set to 1 for all inputs used in mdlOutputs
ssSetInputPortDirectFeedThrough(S, 0, 1);
ssSetInputPortDirectFeedThrough(S, 1, 1);
// one sample time
ssSetNumSampleTimes(S, 1);
}
#if defined(MATLAB_MEX_FILE)
#define MDL_SET_INPUT_PORT_DIMENSION_INFO
#define MDL_SET_OUTPUT_PORT_DIMENSION_INFO
static void mdlSetInputPortDimensionInfo(SimStruct *S, int_T port, const DimsInfo_T *dimsInfo)
{
if ( !ssSetInputPortDimensionInfo(S, port, dimsInfo) )
return;
}
static void mdlSetOutputPortDimensionInfo(SimStruct *S, int_T port, const DimsInfo_T *dimsInfo)
{
if ( !ssSetOutputPortDimensionInfo(S, port, dimsInfo) )
return;
}
#endif /* MATLAB_MEX_FILE */
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, SAMPLINGTIME);
ssSetOffsetTime(S, 0, 0.0);
}
static void mdlStart(SimStruct *S)
{
nmpc_solver_capsule *capsule = nmpc_acados_create_capsule();
nmpc_acados_create(capsule);
ssSetUserData(S, (void*)capsule);
}
static void mdlOutputs(SimStruct *S, int_T tid)
{
nmpc_solver_capsule *capsule = ssGetUserData(S);
ocp_nlp_config *nlp_config = nmpc_acados_get_nlp_config(capsule);
ocp_nlp_dims *nlp_dims = nmpc_acados_get_nlp_dims(capsule);
ocp_nlp_in *nlp_in = nmpc_acados_get_nlp_in(capsule);
ocp_nlp_out *nlp_out = nmpc_acados_get_nlp_out(capsule);
InputRealPtrsType in_sign;
int N = NMPC_N;
// local buffer
real_t buffer[8];
/* go through inputs */
// lbx_0
in_sign = ssGetInputPortRealSignalPtrs(S, 0);
for (int i = 0; i < 8; i++)
buffer[i] = (double)(*in_sign[i]);
ocp_nlp_constraints_model_set(nlp_config, nlp_dims, nlp_in, 0, "lbx", buffer);
// ubx_0
in_sign = ssGetInputPortRealSignalPtrs(S, 1);
for (int i = 0; i < 8; i++)
buffer[i] = (double)(*in_sign[i]);
ocp_nlp_constraints_model_set(nlp_config, nlp_dims, nlp_in, 0, "ubx", buffer);
/* call solver */
int rti_phase = 0;
ocp_nlp_solver_opts_set(nlp_config, capsule->nlp_opts, "rti_phase", &rti_phase);
int acados_status = nmpc_acados_solve(capsule);
/* set outputs */
// assign pointers to output signals
real_t *out_u0, *out_utraj, *out_xtraj, *out_status, *out_sqp_iter, *out_KKT_res, *out_KKT_residuals, *out_x1, *out_cpu_time, *out_cpu_time_sim, *out_cpu_time_qp, *out_cpu_time_lin, *out_cost_value;
int tmp_int;
out_u0 = ssGetOutputPortRealSignal(S, 0);
ocp_nlp_out_get(nlp_config, nlp_dims, nlp_out, 0, "u", (void *) out_u0);
out_utraj = ssGetOutputPortRealSignal(S, 1);
for (int ii = 0; ii < N; ii++)
ocp_nlp_out_get(nlp_config, nlp_dims, nlp_out, ii,
"u", (void *) (out_utraj + ii * 2));
out_xtraj = ssGetOutputPortRealSignal(S, 2);
for (int ii = 0; ii < 11; ii++)
ocp_nlp_out_get(nlp_config, nlp_dims, nlp_out, ii,
"x", (void *) (out_xtraj + ii * 8));
out_status = ssGetOutputPortRealSignal(S, 3);
*out_status = (real_t) acados_status;
out_cpu_time = ssGetOutputPortRealSignal(S, 4);
// get solution time
ocp_nlp_get(nlp_config, capsule->nlp_solver, "time_tot", (void *) out_cpu_time);
out_sqp_iter = ssGetOutputPortRealSignal(S, 5);
// get sqp iter
ocp_nlp_get(nlp_config, capsule->nlp_solver, "sqp_iter", (void *) &tmp_int);
*out_sqp_iter = (real_t) tmp_int;
}
static void mdlTerminate(SimStruct *S)
{
nmpc_solver_capsule *capsule = ssGetUserData(S);
nmpc_acados_free(capsule);
nmpc_acados_free_capsule(capsule);
}
#ifdef MATLAB_MEX_FILE
#include "simulink.c"
#else
#include "cg_sfun.h"
#endif
make file:
# Directories where S-Function C source files are stored.
SFCN_DIR = \
"\c_generated_code" \
"\c_generated_code\nmpc_model"
# Additional C source files to be compiled (file name extension .c).
USER_SRCS = \
acados_solver_nmpc.c \
acados_sim_solver_nmpc.c \
nmpc_model/nmpc_dyn_disc_phi_fun.c \
nmpc_model/nmpc_dyn_disc_phi_fun_jac.c \
nmpc_cost/nmpc_cost_ext_cost_0_fun.c \
nmpc_cost/nmpc_cost_ext_cost_0_fun_jac.c \
nmpc_cost/nmpc_cost_ext_cost_0_fun_jac_hess.c \
nmpc_cost/nmpc_cost_ext_cost_fun.c \
nmpc_cost/nmpc_cost_ext_cost_fun_jac.c \
nmpc_cost/nmpc_cost_ext_cost_fun_jac_hess.c \
nmpc_cost/nmpc_cost_ext_cost_e_fun.c \
nmpc_cost/nmpc_cost_ext_cost_e_fun_jac.c \
nmpc_cost/nmpc_cost_ext_cost_e_fun_jac_hess.c \
nmpc_constraints/nmpc_constr_h_fun.c \
nmpc_constraints/nmpc_constr_h_fun_jac_uxt_zt_hess.c \
nmpc_constraints/nmpc_constr_h_fun_jac_uxt_zt.c
# Additional assembler source files to be compiled (file name extension .asm).
USER_ASM_SRCS =
# Directories where additional C and assembler source files are stored.
USER_SRCS_DIR =
# Path names for user include files.
USER_INCLUDES_PATH = \
E2E_SPAx\E2E_SPAx\E2ELibrary\inc \
"include" \
"include\blasfeo\include" \
"include\hpipm\include" \
"include\acados_c"
# Additional user object files to be linked.
USER_OBJS =
# Additional user libraries to be linked.
USER_LIBS = \
E2E_SPAx\E2E_SPAx\E2ELibrary\E2E_DSPACE_ds1401.lib \
lib\blasfeo.lib \
lib\hpipm.lib \
lib\acados.lib
# EOF -------------------------------------------------------------------------
Am I missing something?
Thanks for your time and please let me know if further information is required,
Daniel