Hi ![]()
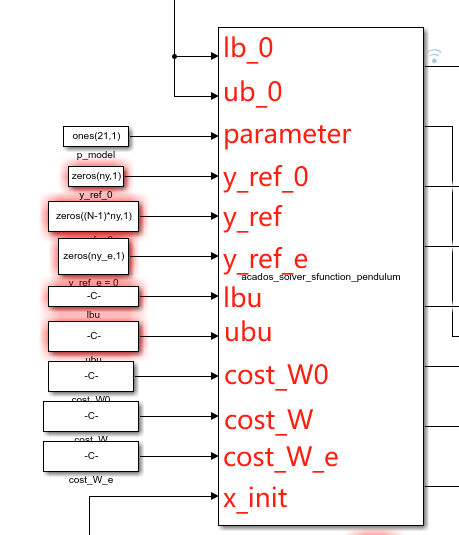
The following figure shows the input and output interface information of Simulink and ACADOS from the example https://github.com/acados/acados/blob/master/examples/acados_matlab_octave/getting_started/simulink_model_closed_loop.slx.
The input interface includes system state constraints, input constraints, and optimal cost function. ACADOS includes a system prediction model that requires real-time system states x information to be input from controlled system. I have checked the input information in https://github.com/acados/acados/blob/master/interfaces/acados_template/acados_template/simulink_default_opts.json and found that it does not include the states x option,
What should I do to input system states information for ACADOS.
Hi,
I think the first two inputs in your screenshot are lbx_0 and ubx_0, which are the bounds on the initial state x_0.
Finally, your last input x_init is the initialization of the state trajectory.
Does that clarify it for you?
Or what specifically else do you want to set?
Hi, Frey, thank you very much for your reply!
As you said, lbx_0 and ubx_0 are the boundaries of the initial state x0. As the simulation progresses, I would like to input the actual system state to s-function ‘acados_solver_sfunction_pendulum’ to update the system model, which corresponds to the actual system states x1, x2…, xn at times t1, t2,…, tn. What should I do. Thank you very much!